Posts: 51755 From: Houston, TX Registered: Nov 1999
posted 08-26-2023 04:57 PM
Japan Aerospace Exploration Agency (JAXA) release
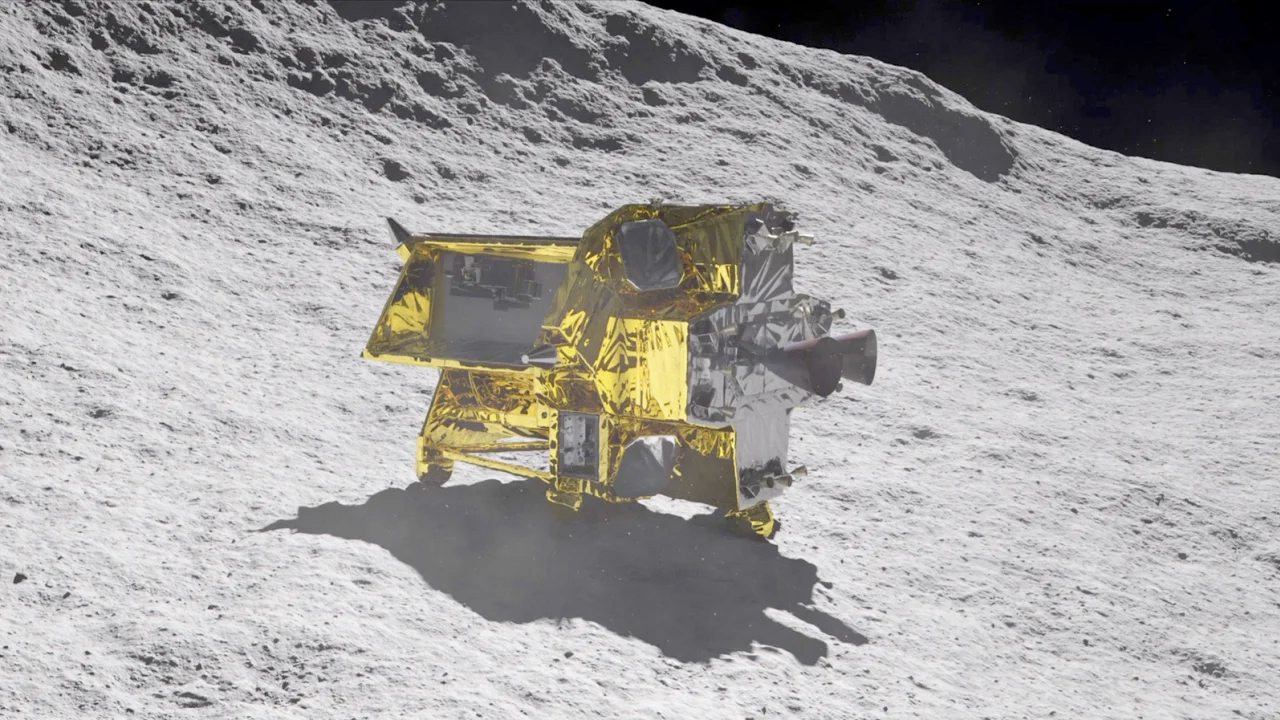
Smart Lander for Investigating Moon (SLIM)
SLIM is a small-scale exploration lander designed for pinpoint landings on the moon's surface, reduction in the size and weight of equipment used in moon landings and investigation into the moon's origins. It will also test technology fundamental to exploration in low-gravity environments, an important requirement for future scientific investigation of the solar system.
SLIM Mission Objectives
Following are the SLIM mission objectives thereby JAXA endeavors to contribute to future missions to explore the moon and other planets:
Demonstration of the accurate lunar landing techniques embodied in a small explorer
Acceleration of the study of the moon and other planets using the lighter exploration system
Future solar science exploration will demand the level of navigation accuracy that JAXA is in the quest for through the SLIM mission. As scientific knowledge builds on the study object, more specific research will be needed. Placing spacecraft with precision facilitates the expertise. Planetary science exploration will additionally call for highly capable equipment for observation. Downsizing the exploration system can reinforce the instruments to be placed into a locale especially well suited for its mission of landing.
Orbit to the Moon
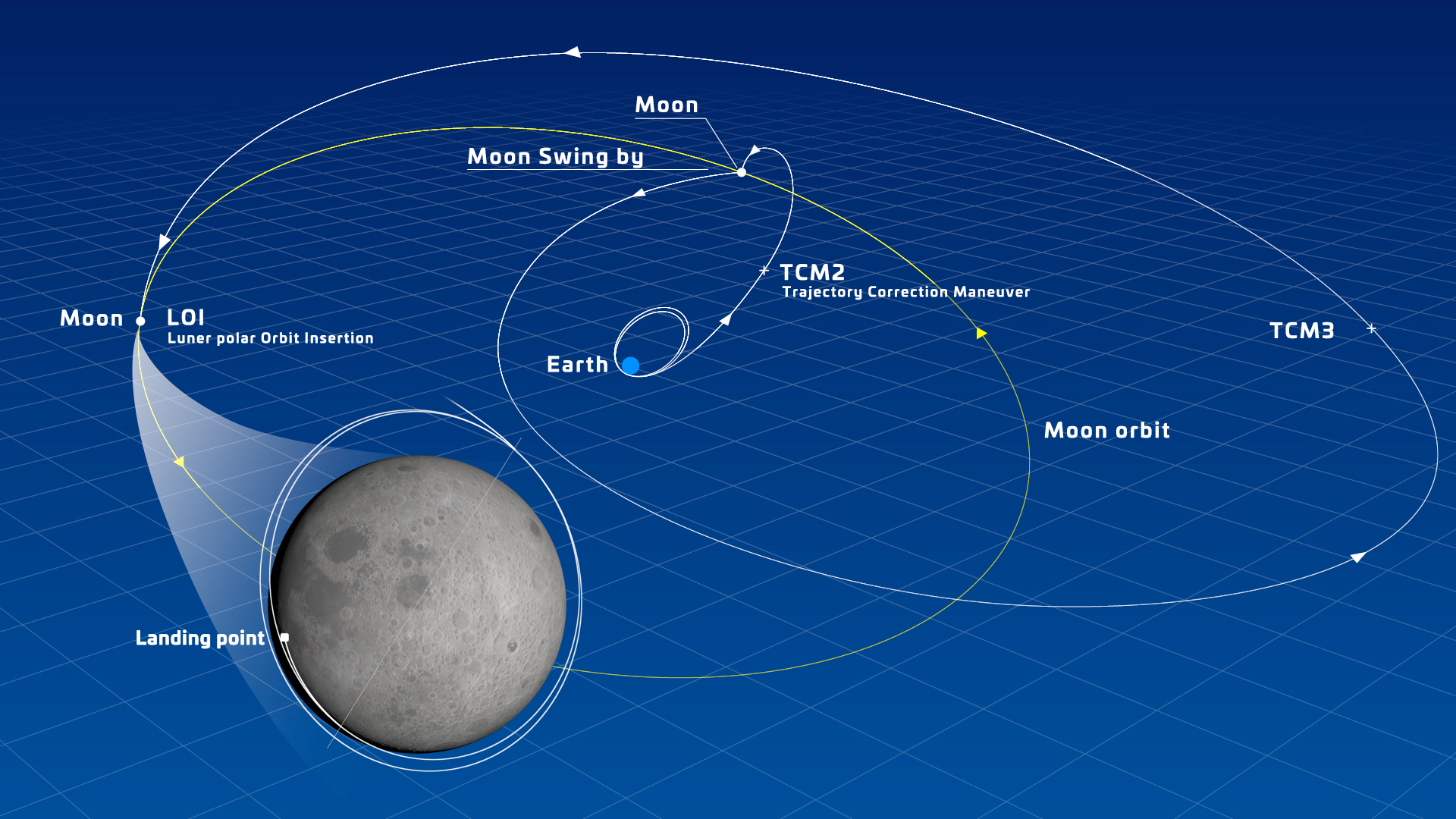
SLIM wisely allocates limited resources (allowable weight) to each component to aim for the moon. That includes the propellant needed to reach and land on the moon. Therefore, in SLIM, we are considering the trajectory shown in the figure below.
While circling the Earth, the timing is right to push the apogee (the point where the SLIM probe is farthest away from Earth) to the distance of lunar orbit. After that, when it passes near the moon, it will perform a lunar swing-by that uses the gravity of the moon to change its trajectory and further raise the apogee altitude. After the lunar swing-by, the solar tidal force will be used to reach the meeting point with the moon.
Landing Sequence
Before the start of the landing sequence: Lunar ellipse 600km x 15km
Before the start of the sequence and in the lunar elliptical orbit, determine the orbit and position of SLIM from the ground and notify SLIM. Based on this information, SLIM will start reverse firing (injection in the direction opposite to the spacecraft's traveling direction) of the main engine at an altitude of 15 km (perilunar point), and shift to the landing sequence.
Powered descent phase: Altitude 15km to 3.5km
The first landing sequence is the power descent phase. During the power descent phase, a total of four coasting periods of about 50 seconds, including the start and end, will be set, during which the attitude of the SLIM-mounted camera will be adjusted so that it is focused on the lunar surface. During the coasting period, the lunar surface will be photographed with a camera, and the position and speed at which it is located will be estimated with high accuracy from the images.
SLIM will reach the sky above the landing point with such automatic control.
Vertical descent phase: Altitude 3.5km to 0m
After reaching the sky above the landing site, SLIM descends almost vertically while detecting the altitude with the landing radar.
Obstacle detection: Altitude about 50m
During the vertical descent phase, "obstacle detection" is performed at a certain altitude (for example, about 300m), and the horizontal position is fine-tuned according to the situation of obstacles directly below the spacecraft.
Cut off the main engine: Altitude about 3m
When it reaches near the surface of the moon (for example, at an altitude of about 3m), it will cut off the main engine and land while controlling its attitude.
Exploring the Origin of the Moon
With SLIM, the hope is to obtain the key to unlocking the mysteries of the moon's formation and evolution. There is a theory that the moon was formed by a giant impact. In this case, the composition of the mantle, which accounts for 90% of the moon, would be similar to that of Earth. Since the mantle is a material inside the moon, it is necessary to examine the places where the mantle is exposed on the lunar surface in order to directly investigate its composition.
One of the various discoveries made by the lunar orbiter Kaguya was the discovery of a place on the lunar surface where material thought to be derived from the mantle was exposed. Therefore, SLIM will make a pinpoint landing near the crater where the mantle-derived material is exposed and observe it in situ.
Inside and around craters excavated by meteorite impacts, there are places where lunar internal materials that cannot be seen elsewhere are thought to have been exposed. Specifically, it is predicted that there is a rock containing what is considered to be mantle material called "olivine." Olivine is a material that sank inside the lunar mantle due to its high specific gravity when the primitive moon was still hot and melting. By examining the olivine-containing rocks in detail and comparing their compositions with those on Earth, we will approach the mysteries of the formation and evolution of the moon.
SLIM will be equipped with a Multi-Band Camera (MBC) to investigate the composition of olivine. MBC aims to determine the composition of olivine by spectroscopically reflecting sunlight on the moon (dividing it into rainbow colors) and examining the light intensity at each wavelength.
Robert Pearlman Editor
Posts: 51755 From: Houston, TX Registered: Nov 1999
posted 09-06-2023 05:40 PM
JAXA live video
The live coverage of the launch of XRISM/SLIM.
Broadcast schedule: 8:10 a.m. on Sept. 7, 2023 JST (7:10 p.m. EDT or 2310 GMT on Sept. 6). Launch time: 8:42:11 a.m. JST (7:42:11 p.m. EDT or 2342 GMT).
Robert Pearlman Editor
Posts: 51755 From: Houston, TX Registered: Nov 1999
Successful Launch of the Smart Lander for Investigating Moon (SLIM)
The Smart Lander for Investigating Moon (SLIM) was launched onboard the H-IIA Launch Vehicle No. 47 (H-IIA F47) at 8:42:11 a.m. on Sept. 7, 2023 (Japan Standard Time, JST) from the Tanegashima Space Center.
The launch vehicle flew as planned, and it was confirmed that SLIM was successfully separated from the launch vehicle at about 47 minutes and 33 seconds after launch.
We would like to express our profound appreciation for the cooperation of all parties involved in the launch of SLIM.
Robert Pearlman Editor
Posts: 51755 From: Houston, TX Registered: Nov 1999
Moon Landing of the Smart Lander for Investigating Moon (SLIM)
The Japan Aerospace Exploration Agency (JAXA) is pleased to announce that the Smart Lander for Investigating Moon (SLIM), which was launched on September 7, 2023, is currently operating smoothly. While the lunar surface landing was initially scheduled for January or February 2024, based on the smooth progress of operations, it will now be conducted as follows:
January 20, 2024 (Saturday)
About 12:00 a.m. (JST) Starting descent toward the Moon
About 12:20 a.m. JST [10:20 a.m. EST or 1520 GMT on Jan. 19] Landing on the lunar surface
Please note that if the landing is not executed at the timing mentioned above, a next opportunity is scheduled around February 16, 2024.
SLIM aims to achieve a pinpoint landing with an accuracy of less than 100 meters. This marks an unprecedentedly high-precision landing on a gravitational body such as the Moon, and the results are anticipated to contribute to the programs such as international space exploration that are currently under study.
Upcoming schedule leading to the lunar landing:
December 25, 2023: Lunar orbit insertion
Mid-January, 2024: Commencement of preparations for landing (orbit adjustment)
January 19, 2024: Completion of transition to the orbit before landing
Robert Pearlman Editor
Posts: 51755 From: Houston, TX Registered: Nov 1999
posted 12-25-2023 09:40 AM
Japan Aerospace Exploration Agency (JAXA) release
Smart Lander for Investigating Moon (SLIM) lunar orbit insertion
The Japan Aerospace Exploration Agency (JAXA) is pleased to announce that the Smart Lander for Investigating Moon (SLIM) was successfully inserted into lunar orbit at 16:51 Japan Standard Time (2:51 a.m. EST or 0751 GMT) on Dec. 25, 2023.
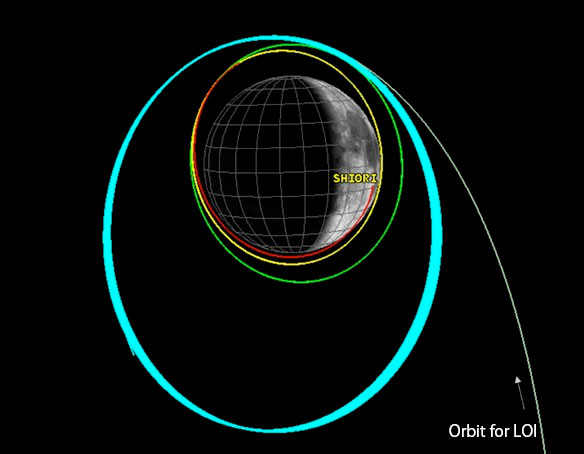
The lunar orbit of SLIM will be inserted into an elliptical lunar orbit connecting the Moon’s north and south poles with a period of approximately 6.4 hours, and altitude of about 600km at the closest point to the Moon (perilune), and 4,000km at the furthest point from the Moon (apolune). The orbit change proceeded as planned, and the spacecraft is currently in a normal condition.
From now until mid-January 2024, the apolune point will be lowered, and the orbit adjusted to a circular orbit at an altitude of approximately 600km. The perilune point will then lower and preparations for landing will begin. On January 19, the perilune point will be lowered to an altitude of 15km, and the descent towards the Moon will start at around 0:00am (JST) on January 20. Landing on the lunar surface is scheduled for around 0:20am (JST) on January 20.
Japan has become the fifth country to successfully land a spacecraft on the moon, although a power issue has cut short the robotic probe's lifetime on the lunar surface.
The Smart Lander for Investigating Moon (or SLIM) touched down near Shioli crater on Friday (Jan. 19) at 10:20 a.m. EST (1520 GMT or 12:20 a.m. Japan Standard Time on Jan. 20). Japan has joined Russia, the United States, China and India as the only nations to have reached the surface of the moon.
Robert Pearlman Editor
Posts: 51755 From: Houston, TX Registered: Nov 1999
posted 01-25-2024 02:24 AM
Japan Aerospace Exploration Agency (JAXA) release
Outcome for the Smart Lander for Investigating Moon's (SLIM) Moon Landing
The Japan Aerospace Exploration Agency (JAXA) Smart Lander for Investigating Moon (SLIM) landed on the lunar surface on January 20, 2024 at 0:20 am JST, and communication was established with the Earth.
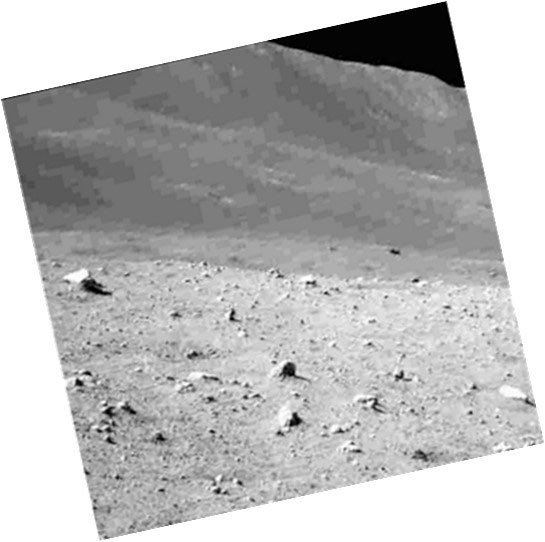
However, due to the spacecraft not being at the planned attitude upon landing, power generation was not possible from the solar cells, and the spacecraft was shutdown with a command from the ground at 2:57 am JST.
Above: Image of the lunar surface captured by the SLIM onboard navigation camera after landing. (JAXA)
Analysis of the data acquired before shutting down the power confirmed that SLIM had reached the Moon's surface approximately 55m east of the original target landing site. The positional accuracy before the commencement of the obstacle avoidance maneuver (at around a 50m altitude) which indicates the pinpoint landing performance, was evaluated to be at approximately 10m or less, possibly about 3 - 4m. While more detailed evaluation continues, it is reasonable to mention that the technology demonstration of pinpoint landing within an accuracy of 100m, which has been declared to be the main mission of SLIM, has been achieved.
All technical data on the navigation guidance leading to the landing, and navigation camera image data captured during the descent and on the lunar surface that is necessary for future pinpoint landing technology, was obtained from the spacecraft. The small probes (LEV-1 and LEV-2) were successfully separated just prior to landing in this contingency situation. The multi-band spectroscopic camera (MBC) onboard SLIM was also operated on a trial basis and captured images until the power was turned off.
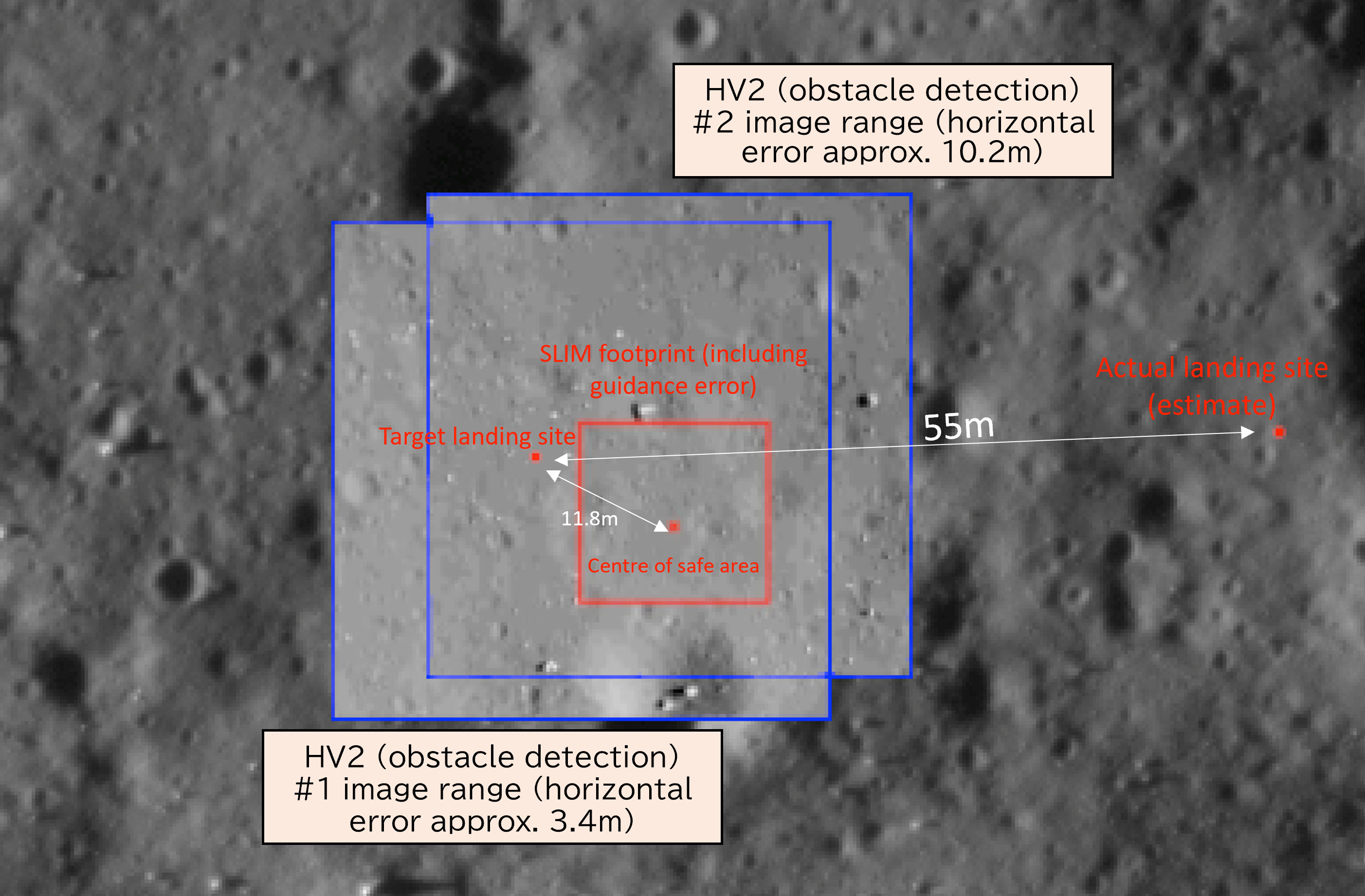
Above: Estimation of SLIM’s current location and the target landing site.
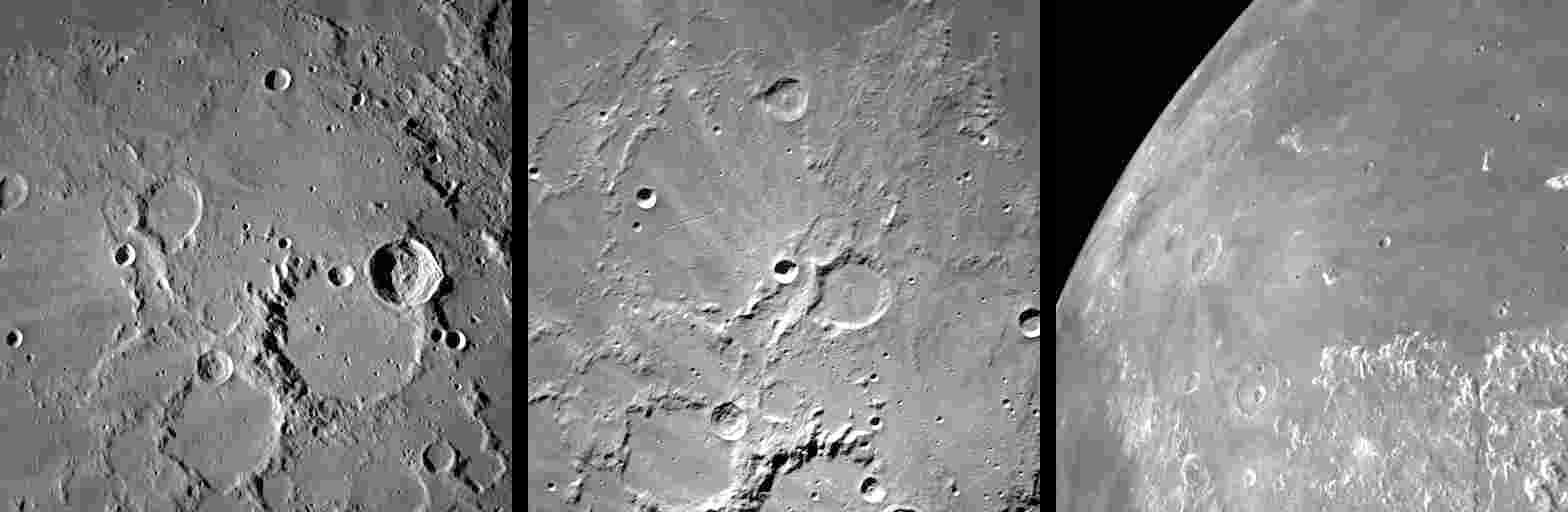
Lunar topography captured by the Indian spacecraft Chandrayaan-2, overlaid with images acquired by the SLIM navigation camera during the HV2 (second hovering) at an altitude of about 50m. The two blue frames are images acquired during the obstacle detection at HV2. As the spacecraft subsequently enters the obstacle avoidance operation, the performance of the pinpoint landing is evaluated based on the positional accuracy at this point. The positional accuracy at the time of the first and second obstacle detection was respectively about 3 - 4m and 10m. Note that it is highly likely that the main engine was already affected by the loss of function when the second obstacle detection occurred. The SLIM footprint in the red frame is the safe landing zone set autonomously by SLIM based on the obstacle detection during HV2. (Chandrayaan-2:ISRO/SLIM:JAXA)
Regarding the circumstances of how SLIM became stationary on the lunar surface at an attitude that could not generate power from the solar cells, the acquired technical data revealed that at an altitude of 50m just prior to the start of the obstacle avoidance maneuver, the thrust from one of the two main engines was most likely lost. Under these circumstances, the SLIM onboard software autonomously identifies the anomaly, and while controlling the horizontal position as much as possible, SLIM continued the descent with the other engine and moved gradually towards the east.
The descent velocity at the time of contact with the ground was approximately 1.4 m/s or less, which was below the design range, but conditions such as the lateral velocity and attitude were outside the design range, and this is thought to have resulted in a different attitude than planned. The cause of the loss of the main engine functionality is now being investigated, including consideration of external factors aside from the engine itself, with the plan to determine the detailed cause. We will provide further information as the investigation progresses.
Regarding future activities, further analysis of the acquired technical and scientific data, as well as analysis of the cause of the anomalies that occurred, will proceed. Analysis of the data has shown that SLIM's solar cells are currently facing west, suggesting that there is the possibility for power generation and thus recovery of SLIM as the sunlight illumination condition improves with time. Although SLIM's activities on the Moon were originally expected to last only a few days, the necessary preparations for recovery will continue in order to acquire further technical and scientific data.
Robert Pearlman Editor
Posts: 51755 From: Houston, TX Registered: Nov 1999
posted 01-25-2024 09:07 AM
Japan Aerospace Exploration Agency (JAXA) release
Result and Achievements of the Lunar Excursion Vehicle (LEV-1) on board Smart Lander for Investigating Moon (SLIM)
The Japan Aerospace Exploration Agency (JAXA) confirmed on January 20, 2024, that the Lunar Excursion Vehicle (LEV-1), a small robot deployed from the Smart Lander for Investigating Moon (SLIM), successfully conducted activities on the lunar surface. The telemetry data were sent directly from the small robot.
According to telemetry data, after deployment from SLIM, LEV-1 executed planned leaping movements and direct communication with ground stations, including inter-robot test radio wave data transmission from the Transformable Lunar Robot (LEV-2, nicknamed "SORA-Q"). On the other hand, image acquisition on the lunar surface has not been confirmed as of now.
Currently, LEV-1 has completed its planned operational period on the lunar surface, depleted its designated power, and is in a standby state on the lunar surface. While the capability to resume activity exists contingent on solar power generation from changes in the direction of the sun, efforts will be maintained to continue receiving signals from LEV-1.
Both LEV-1 and LEV-2 have become Japan's first lunar exploration robots. Additionally, the small LEV-1 with a mass of 2.1 kg (including a 90g communication device), achieved successful direct communication with Earth from the moon. This is considered as the world's smallest and lightest case of direct data transmission from approximately 380,000 kilometers away.
Furthermore, the accomplishment of LEV-1's leaping movements on the lunar surface, inter-robot communication between LEV-1 and LEV-2, and fully autonomous operations represent groundbreaking achievement. It would be regarded as a valuable technology demonstration for future lunar explorations, and the acquired knowledge and experience will be applied in upcoming missions.
Moreover, the transmission of UHF band radio waves from LEV-1 as part of outreach efforts has encouraged participation from amateur radio operators globally, and we have been receiving reports of successful signal receptions. This initiative provided an opportunity for the public to be directly engaged in lunar exploration missions. We would like to extend our sincere gratitude to everyone involved in the LEV-1 mission.
Robert Pearlman Editor
Posts: 51755 From: Houston, TX Registered: Nov 1999
posted 01-25-2024 09:07 AM
Japan Aerospace Exploration Agency (JAXA) release
Images taken by the Multi-Band Camera (MBC) on board the Smart Lander for Investigating Moon (SLIM)
The Japan Aerospace Exploration Agency (JAXA), along with the University of Aizu and Ritsumeikan University, has released images captured by the Multi-Band Camera (MBC) onboard the Smart Lander for Investigating Moon (SLIM).
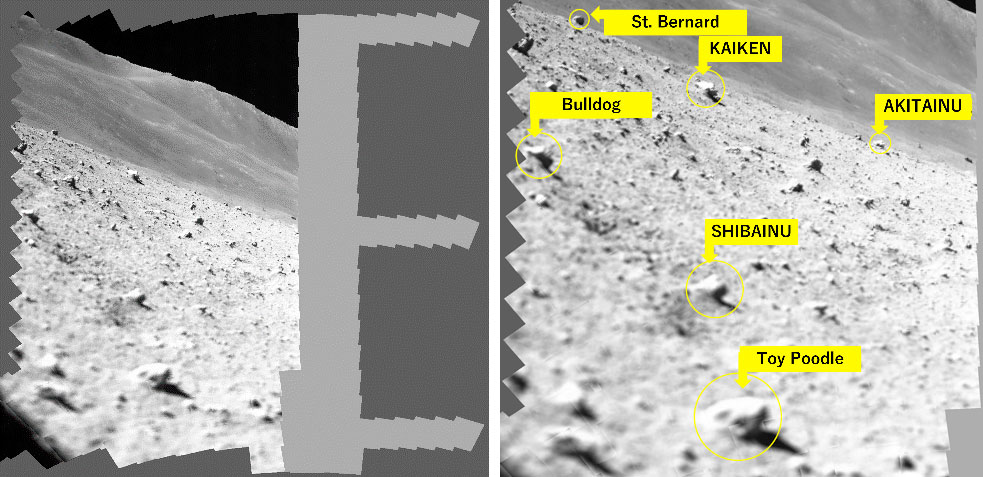
After the moon landing and before shutting down of the spacecraft power, MBC released the locking mechanism to withstand the impact upon launch and landing, then conducted scanning operations. The scanning is performed by moving the adjustable mirror and is for preliminary examination of the rocks of scientific interest that are situated around the SLIM landing site. Figure 1 shows a landscape image created by synthesizing 257 low-resolution monochrome pictures.
Based on this landscape image, the team is sorting out rocks of interest, assigning a nickname to each of them, with intent of communicating their relative sizes smoothly by the names. Preparation is underway to promptly conduct 10-band high-resolution spectroscopic observations once the solar illumination condition improves and SLIM recovers by the power generated by the solar array.
Above: Lunar surface scan mosaic image captured by the SLIM-mounted MBC (left) and its enlarged view (right). The grey area on the right of the mosaic lacks data due to the discontinuation of scanning operation. (JAXA, Ritsumeikan University, The University Of Aizu)





 posted 08-26-2023 04:57 PM
posted 08-26-2023 04:57 PM