If you have previously registered, but forgotten your password, click here.
Named for its modular, scalable design, the CubeRover was co-developed with Carnegie Mellon University, with input from a NASA team at Kennedy, and marks the completion of work on NASA's $750,000 Small Business Innovation Research (SBIR) Phase 2 contract to develop a lightweight rover with flight characteristics.
Astrobotic has since refined and commercialized the CubeRover product line with the goal of supporting mobility as a service with a variety of diverse payloads, making lunar access easier for smaller tech demonstrations and scientific investigations. The rover is also designed to be integrated onto multiple lunar landers for voyages to the Moon, facilitating its inclusion on a wide variety of future space missions.
Designing the compact CubeRover presented an array of engineering challenges for the Astrobotic and Carnegie Mellon teams. Among many concerns, the teams were tasked with regulating the rover's temperature in extreme climate fluctuations, keeping its mass minimal, and ensuring the rover maintained optimum mobility for instruments operating on the rover. The teams created a robust thermal design able to endure temperatures ranging from space (-455ºF) to the lunar surface (260ºF). The result is the lightest commercial planetary rover ever created. The CubeRover was also outfitted with a calibrated camera used to orient itself relative to known objects on the lunar surface, such as Astrobotic's Peregrine lander. The ability for the rover's operation team to recognize its position on the Moon augments the value of the data, allowing payload customers to make informed decisions about where to travel next.
"Because our CubeRover is so light — in the four kilogram range — it dramatically reduces flight cost, making the Moon more accessible to more customers," says Mike Provenzano, Astrobotic's Director of Planetary Mobility. ""We're also including industry standard interfaces throughout the rover to simplify the payload integration process."
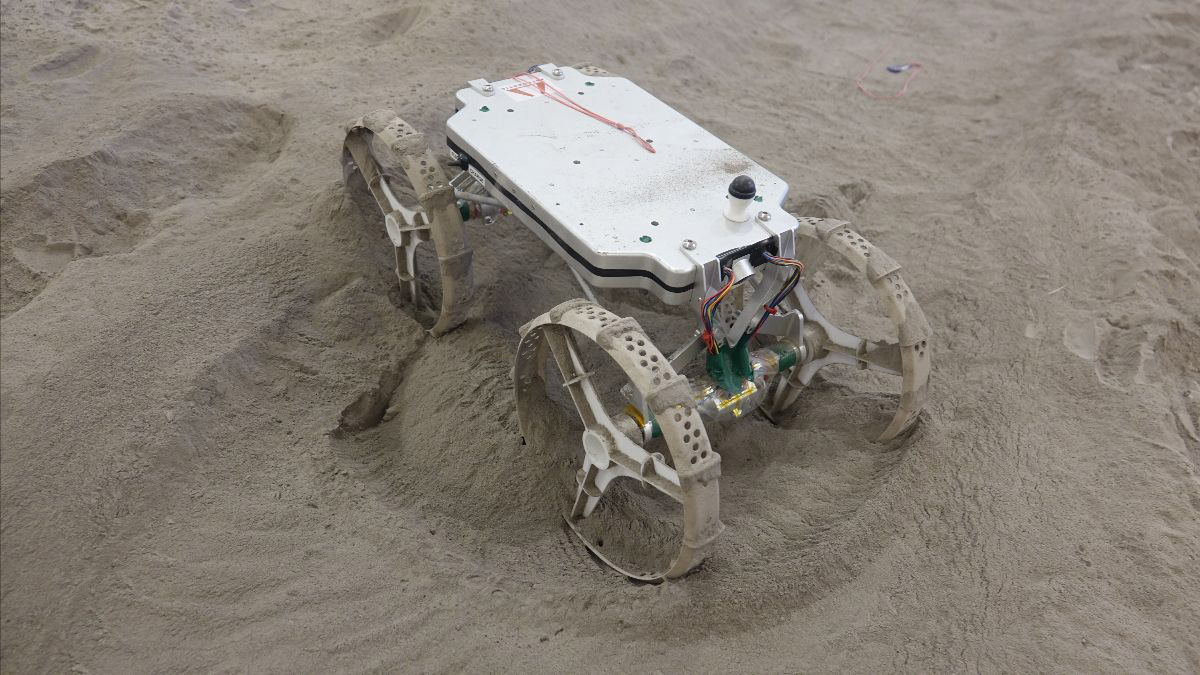
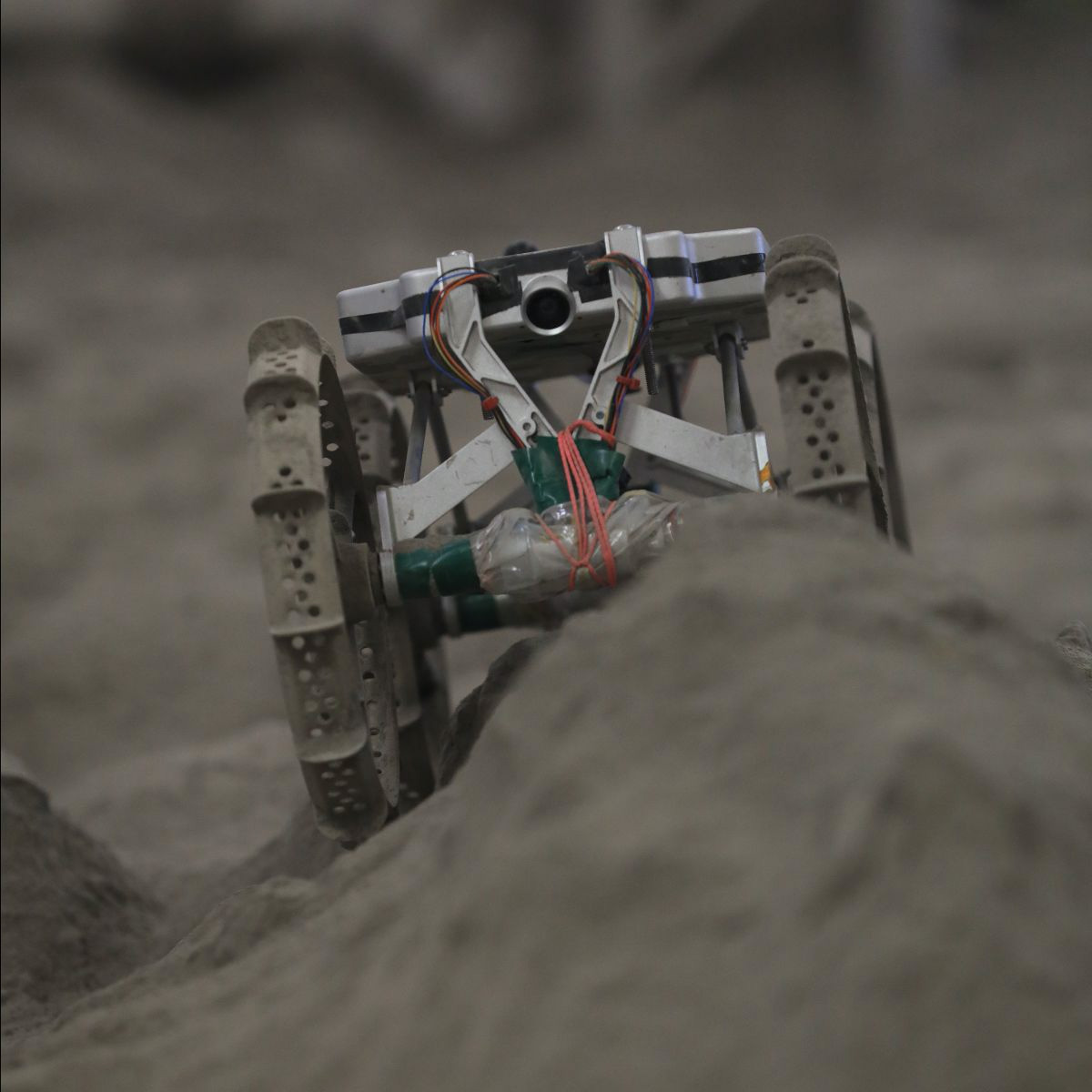
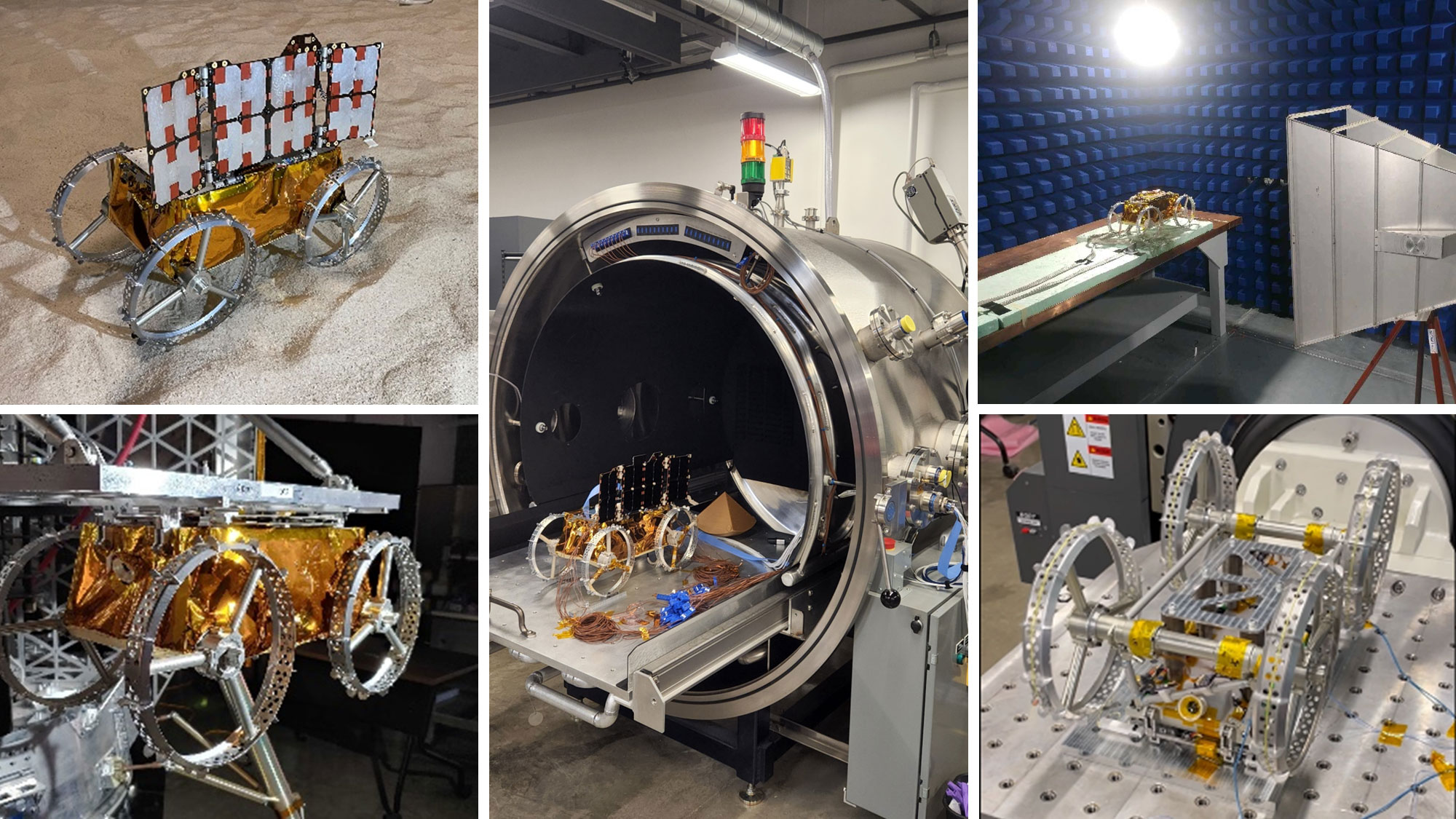
In the coming months, a team at Kennedy's Granular Mechanics and Regolith Operations (GMRO) Laboratory will conduct a battery of mobility tests on the CubeRover in their analogous lunar regolith simulant — a terrain that closely mimics the mechanical properties of the lunar surface. These tests will measure the slopes, gaps, and other surface irregularities the rover can navigate. Drop testing will ensure the rover is not at risk of tipping over during its deployment from a lander to the lunar surface.
Astrobotic's work on CubeRover will continue through its $2M Tipping Point contract with NASA, concluding in February 2022. This program funds the flight qualification of the 2U CubeRover product line, and also outfits the rover with a set of advanced features including a lighter all-wheel-drive system, a solar array for recharging, adaptive image compression, and additional interfaces to support a wider variety of landers and payloads.
Astrobotic’s CubeRover successfully completed more than 150 mobility tests inside a 120-ton enclosure designed to mimic the surface of the Moon. These tests will further inform the final wheel design of all three sizes of the scalable CubeRover line.
Because CubeRovers are smaller than any rover that has operated on the lunar surface, only estimates from prior NASA missions with large rovers could inform initial engineering efforts. With eleven sets of wheels to test, the Astrobotic crew headed to NASA Kennedy Space Center’s (KSC) to conduct maneuverability and traction force testing on the lunar dust simulant.
“This is really a new frontier Astrobotic is exploring – we are pushing the understanding of small-scale mobility on the Moon. Larger rovers and smaller rovers interact differently with lunar regolith simulant,” says Troy Arbuckle, Planetary Mobility Lead Mechanical Engineer at Astrobotic. “The data we collected is invaluable. Two sets of wheels exceeded testing expectations, informing our path forward to continue maturing the CubeRover line.”
Astrobotic partnered with KSC under a $2M Tipping Point contract with NASA to conduct testing in KSC’s Granular Mechanics and Regolith Operations laboratory. The lab consists of a flour-like dust that compacts to a hard rock when compressed. Draw bar pull, slope, and point turn testing data collected from the CubeRover sensors and other hardware informed the performance of CubeRover wheels in an analogue lunar environment. Some wheel sets were capable of climbing 30-degree slopes while others successfully navigated and turned in deep regolith.
“The team at KSC has been extremely accommodating and knowledgeable. They got down and dirty moving around the lunar regolith to diversify our testing on CubeRover. We are all looking ahead for more opportunities to work together. We decided to drive the CubeRover alongside KSC’s RASSOR rover to simulate how RASSOR could dig a trench and CubeRover could drive in, collect samples, and drive back out,” says Astrobotic’s Troy Arbuckle.
Astrobotic will continue work optimizing the shape and size of CubeRover’s wheels. Additional testing will continue at Astrobotic headquarters in Pittsburgh to verify rover deployment methods, solar panel deployment, thermal vacuum survivability, launch survivability, and more. Efforts for CubeRover will culminate in a high-fidelity engineering unit, followed by a flight qualified product in 2022.
Robert Pearlman
Astrobotic release
CubeRover Funded for Survive-the-Lunar-Night Mission
Astrobotic has been selected by NASA's Small Business Innovation Research (SBIR) Sequential Phase II program to develop, test, and fly lunar night survival and communication technologies onboard its CubeRover platform. The effort will culminate in a commercial flight to the Moon for CubeRover on an upcoming Astrobotic lander mission, where it will demonstrate the platform's ability to survive the harsh environment of lunar night and utilize satellite relays to traverse long distances.
Surviving the lunar night is no small feat. Temperatures can easily drop to – 200⁰C, which would typically disable thermally sensitive components like batteries and electronics and end a rover mission after just one lunar day of operation. To help address this challenge, Astrobotic has also been subcontracted by Advanced Cooling Technologies, Inc. (ACT) on a separate NASA Sequential SBIR for $1.8M to develop, integrate, and demonstrate lunar night thermal systems aboard lunar rovers and landers.
"This mission has the potential to usher in a new era of robust lunar robotics where instruments and payloads can survive months to even years on the Moon's surface," says Mike Provenzano, Astrobotic's Director of Lunar Surface Systems. "CubeRover will survive longer and drive farther than any lunar rover in its class with this flight, taking Astrobotic a major step forward in opening the Moon to sustained long-term robotic operations. In fact, we even have 1 kilogram of payload space still available on this mission for a payload team looking to take advantage of this capability."
To make full use of lunar night survivability and robust operations, rovers also need to be capable of driving long distances away from their host landers. This poses a significant communication challenge, where a rover's host lander may be over the horizon and unable to share a communication relay between Earth and the rover. To address this challenge, this mission will also demonstrate CubeRover's use of satellite communication relays, which will significantly extend its range.
"Some rovers are planned to rely on network protocols like Long Term Evolution, or LTE, (similar to how your cellphone transmits data) to transmit over long distances. However, these systems suffer from reduced line of sight visibility to their host lander and consequently cannot truly drive that far," says Cedric Corpa de Fuente, Lunar Surface Systems Lead Avionics Engineer. "We've known of this challenge since we started building rovers and it has been a major hurdle to overcome. Following this demonstration, our CubeRover product line's range of surface operations via satellite communications will be greatly extended."
This announcement comes on the heels of CubeRover's recently completed Critical Design Review with NASA's Space Technology Mission Directorate Tipping Point program. The team will now move to complete CubeRover's flight qualification campaign—a major step towards preparing for future missions.
Robert Pearlman
Astrobotic release
Bridgestone Partners with Astrobotic to Develop Lunar Rover Tire
Bridgestone Corporation today announced that the company has reached a collaboration agreement with Astrobotic Technology for joint development of a lunar rover tire.
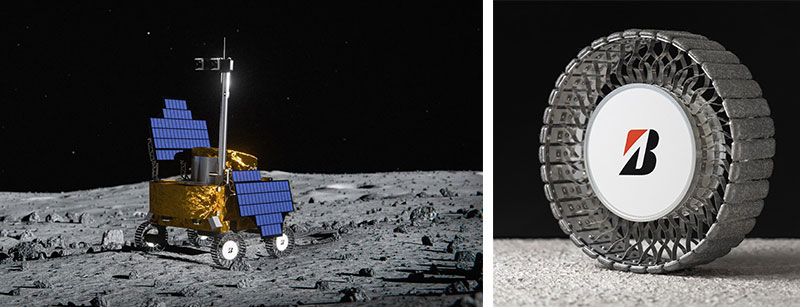
Above: Astrobotic’s 24U CubeRover with tires developed by Bridgestone.
Bridgestone developed a concept model of first- and second-generation tires utilizing its knowledge cultivated for over 90 years of its tire development history, and conducted validation experiments, such as driving tests and simulations. Drawing on its global expertise in supporting all types of mobility on Earth, Bridgestone is now extending its support to the evolution of space mobility, tackling the challenges of lunar exploration. The company's innovations, honed in extreme conditions such as motorsports, will play a key role in advancing mobility on the Moon. Through this project, Bridgestone is committed to being essential for the future of mobility by taking on the challenges of the Moon's extreme and largely unexplored surface.
The Bridgestone lunar rover tire will be developed for the Astrobotic 24U CubeRover. Astrobotic has a legacy of developing lunar rovers for over 17 years, which includes 37 rover technology contracts from NASA and 6 distinct lunar rovers to date. Astrobotic's 24U CubeRover is built to provide mobility, power, and communication support for scientific instruments and payloads on the lunar surface. This 24U rover is about the size of a standard kitchen stove and boasts robust capabilities such as explicit steering, dynamic suspension, and long-distance communications to excel in harsh lunar terrain.
Above: Concept model of Bridgestone lunar rover tire.
The Bridgestone lunar rover tire applies the skeletal structure of metal spokes and features an elastic structure that can deform when driving over obstacles, like lunar rocks. This design aims to maximize shock absorption, traction, and to improve energy efficiency — vital for extended missions. This elastic tire reduces stress on the rover's drivetrain and aids in smooth turning. In the near future, Astrobotic and Bridgestone will qualify the tires for the launch and thermal environments of space.
The co-development of the Bridgestone lunar rover tire with Astrobotic is core to the Bridgestone philosophy of collaboration and co-creation with its business partners. By demonstrating Bridgestone's challenge and pursuit of excellence to its partners, the company is fostering empathy and trust and conducting activities to expand its network in the space industry and co-creation opportunities with international partners. This collaboration with Astrobotic, a leader in space exploration and technology development, marks another step in Bridgestone's efforts to create new opportunities for co-creation with international partners.
Through empowering space mobility by the lunar rover tire development, Bridgestone strives to achieve the corporate commitment of "Extension: Committed to nonstop mobility and innovation that keeps people and the world moving ahead" described in its "Bridgestone E8 Commitment."
Robert Pearlman
Astrobotic release
Astrobotic's CubeRover is Flight-Ready for Lunar Mission
Acceptance test campaign complete for CubeRover’s joint Moon mission aboard Griffin lunar lander
Astrobotic announced today their CubeRover-1 lunar rover successfully completed its acceptance test campaign and has been deemed ready for flight to the lunar south pole aboard Astrobotic’s upcoming Griffin Mission One (Griffin-1).
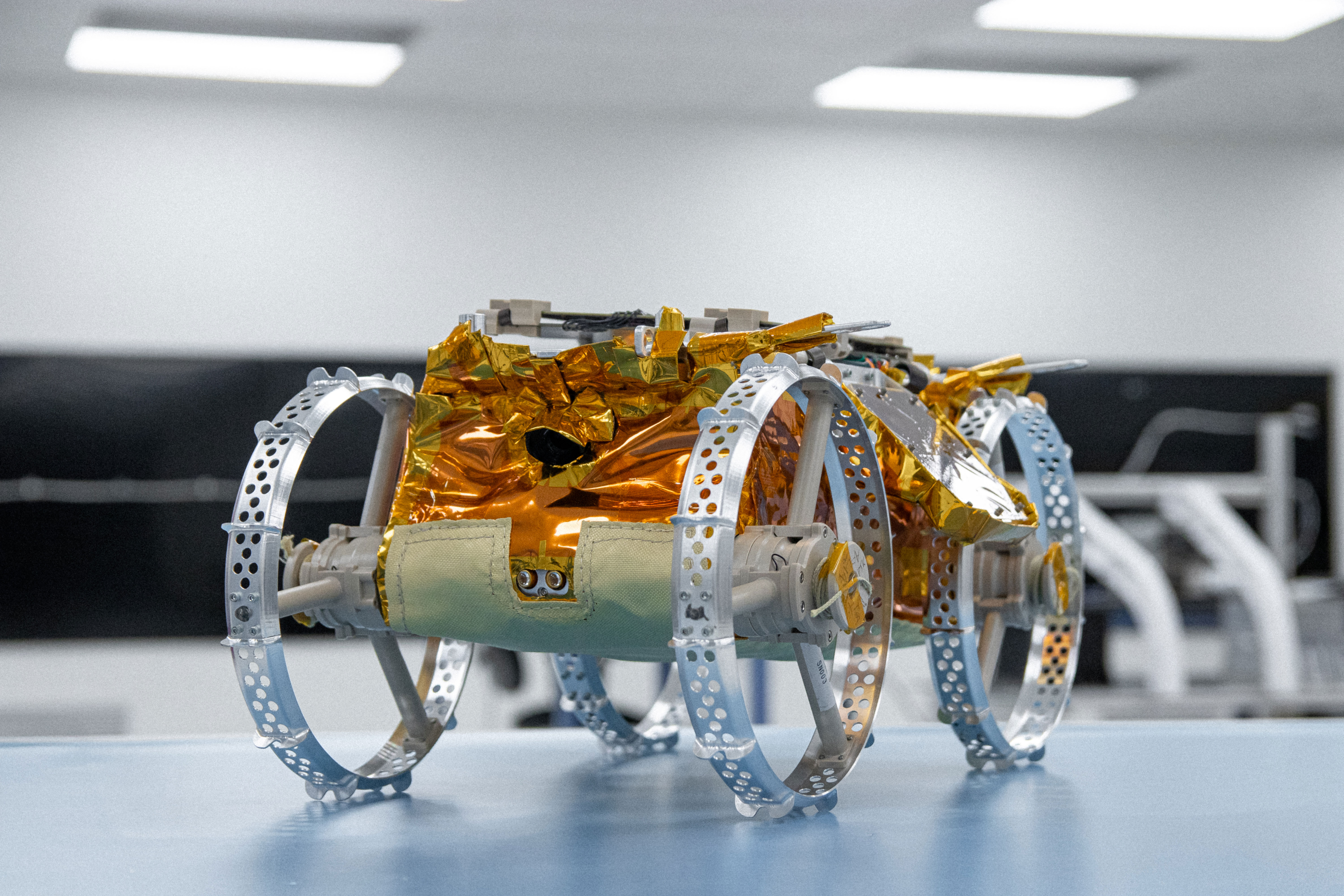
Above: CubeRover-1, pictured in Astrobotic’s clean room. (Astrobotic)
The test campaign put the company’s shoebox-sized CubeRover through its paces, passing a battery of industry-standard tests including thermal-vacuum (TVAC) testing to prove the rover can survive as well as operate in space and on the lunar surface. CubeRover-1 also passed Electromagnetic Interference (EMI)/Electromagnetic Compatibility (EMC) testing which ensures the rover is compatible with its electromagnetic environment, the launch vehicle, and the Griffin lander.
“We saw an opportunity to manifest the first CubeRover on Griffin-1 and accelerated our schedule by 18 months. We took elements of the CubeRover-1 mission from TRL 0 to TRL 6 in eight months, something you don’t hear of very often in the space industry,” said Andrea Davis, project manager and lead mechanical engineer for CubeRover-1 at Astrobotic. “The CubeRover-1 team has this relentless ability to drive through obstacles, both literally and figuratively, and I'm so lucky to work with a team that cares about this mission as much as I do.”
For this mission, CubeRover-1 will integrate with Mission Control’s Spacefarer™ software platform, culminating in a joint mission demonstration named BEACON (Benchmark for Engineering and Autonomous Capabilities in Operations and Navigation). During the BEACON mission, Mission Control’s Spacefarer™ platform will play a mission-critical role in enabling real-time commanding and monitoring of CubeRover-1. This demonstration is made possible in part through funding from the Canadian Space Agency (CSA) under the Lunar Exploration Accelerator Program (LEAP).
Above: Astrobotic’s CubeRover-1 undergoes test campaign ahead of Moon mission. (Astrobotic)
CubeRover-1 was also selected by NASA for a Small Business Innovation Research (SBIR) award for a commercial "mobility-as-a-service" demonstration on the Moon and to advance several critical technologies that will enable future CubeRovers to survive the harsh lunar night and communicate directly with lunar orbital assets. CubeRover will drive into the Griffin lander’s shadow to collect thermal data that will further the development of a compact radioisotope heater unit (RHU) for the CubeRover product line and perform the first-ever in-situ mobility tests to assess lunar surface trafficability for lightweight robotic systems. The rover will also use a software-defined radio (SDR) system to communicate with Griffin in a preliminary demonstration of long-range orbital communications.
“CubeRover-1’s development, test campaign, and upcoming lunar mission is a culmination of 16 years of development and 37 rover technology contracts totaling over $20+ million,” said Davis, “We’re excited to continue this momentum forward to the payload integration activities planned in the coming months with both our Griffin-1 team and our partners at Mission Control Space Services.”
With the test campaign complete, CubeRover-1 will next be integrated with Astrobotic’s Griffin lunar lander to support Griffin-1’s launch window, which is slated for late 2025.